Hallo Zusammen
Es ist wieder ein kleines Stück vorwärts gegangen. Die Schwerpunkte lagen bei folgenden Arbeiten:
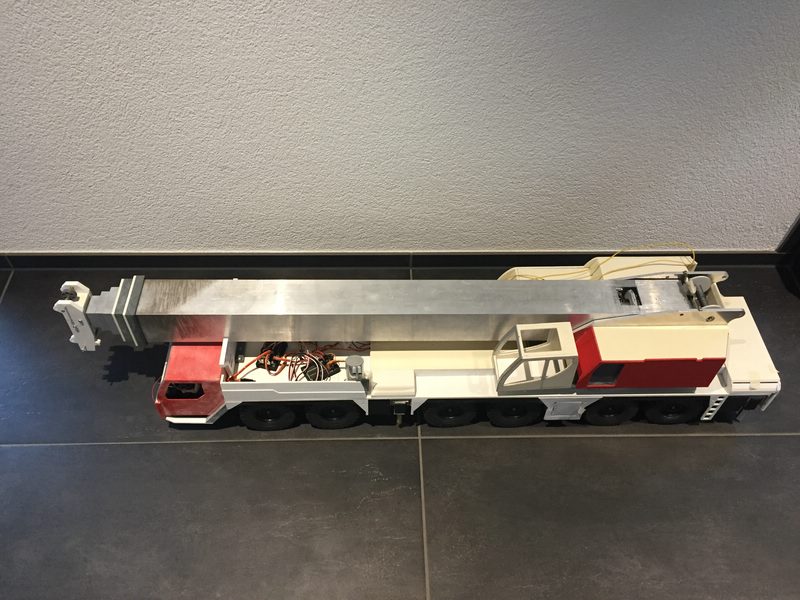
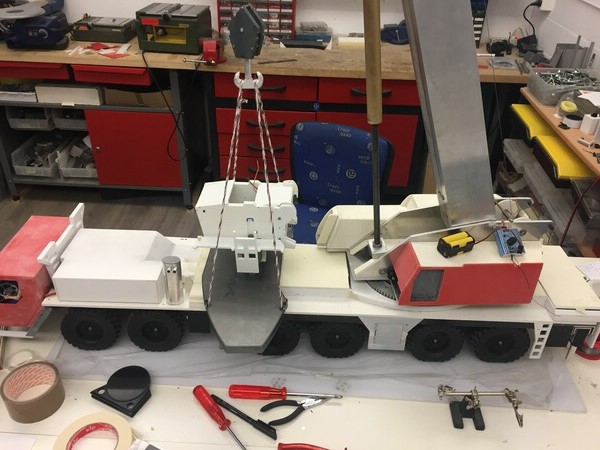
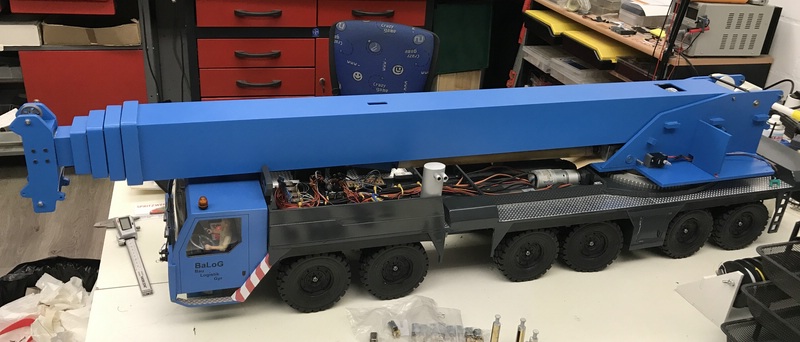
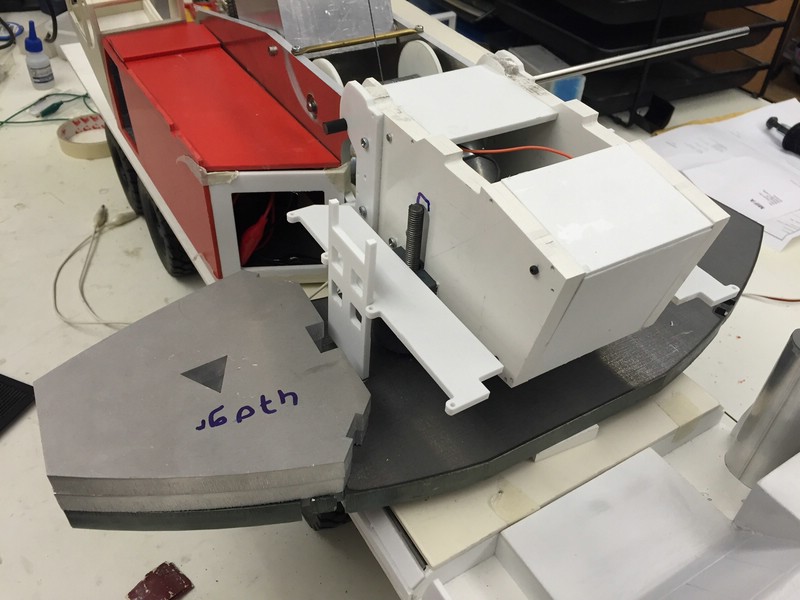
- Oberwagen hinten kürzen (wegen etwa 5mm war ein Durchschwenken des Ballast nicht möglich)
- Lüftungsgitter hinten (wird magnetisch befestigt und dient als Einschubsöffnung für den Akku)
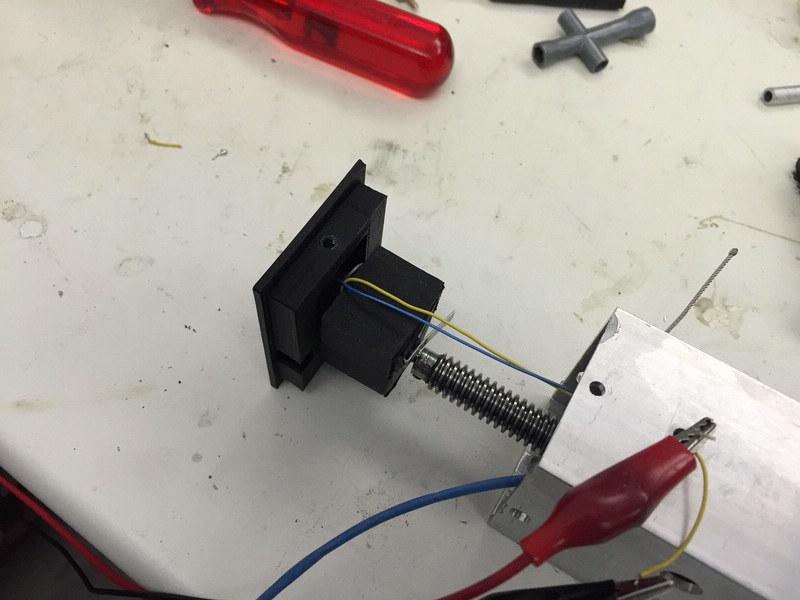
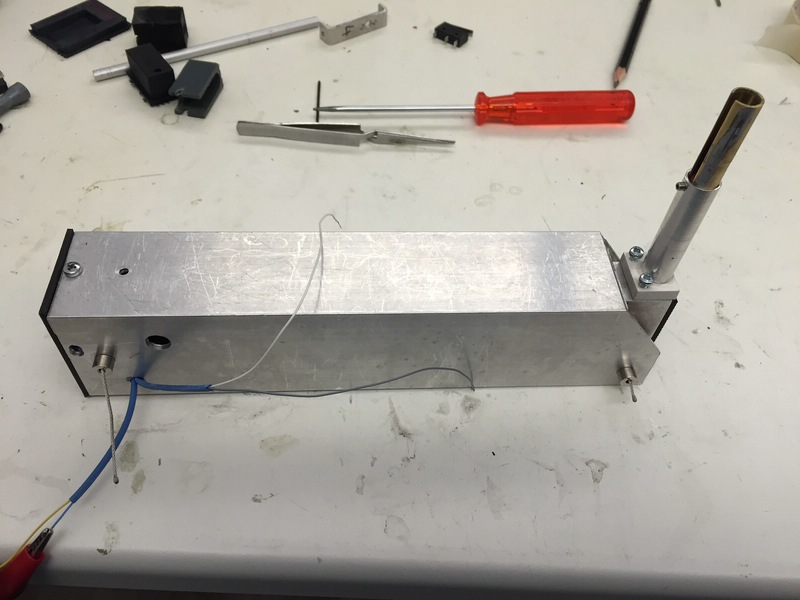
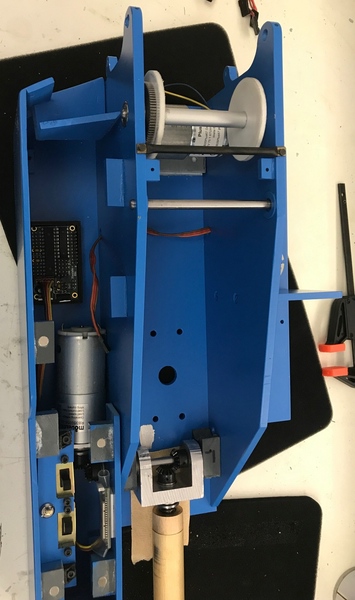
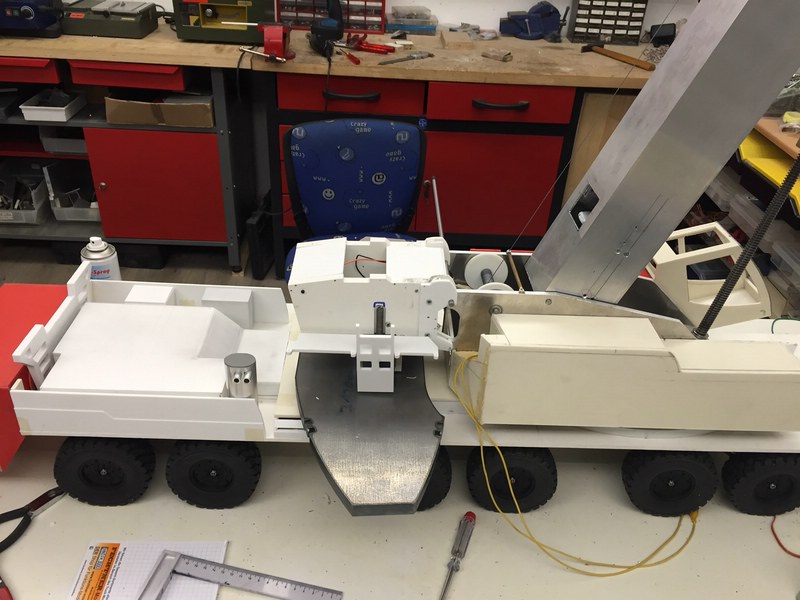
- Fertigstellen Rohbau Ballast (getestet mit 21Kg. Heben funktioniert einwandfrei)
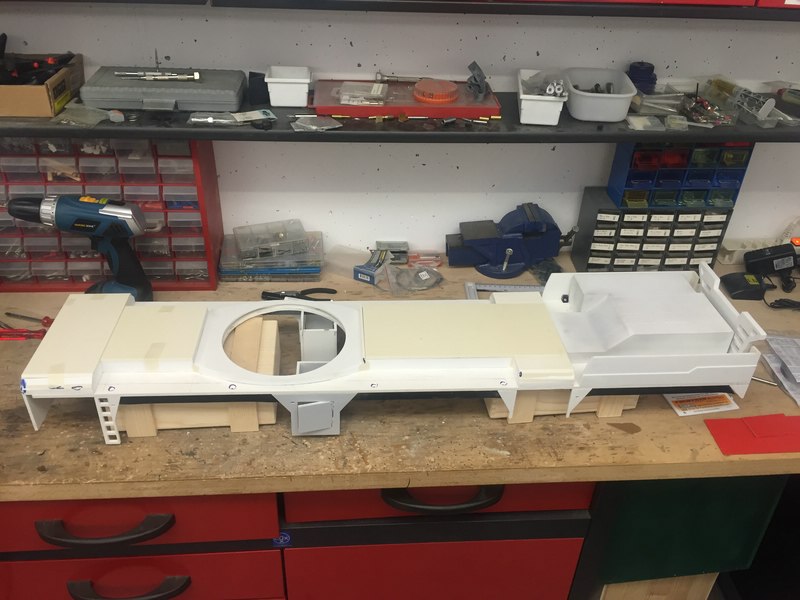
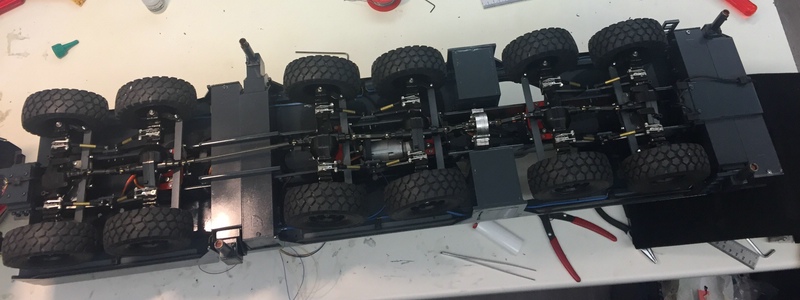
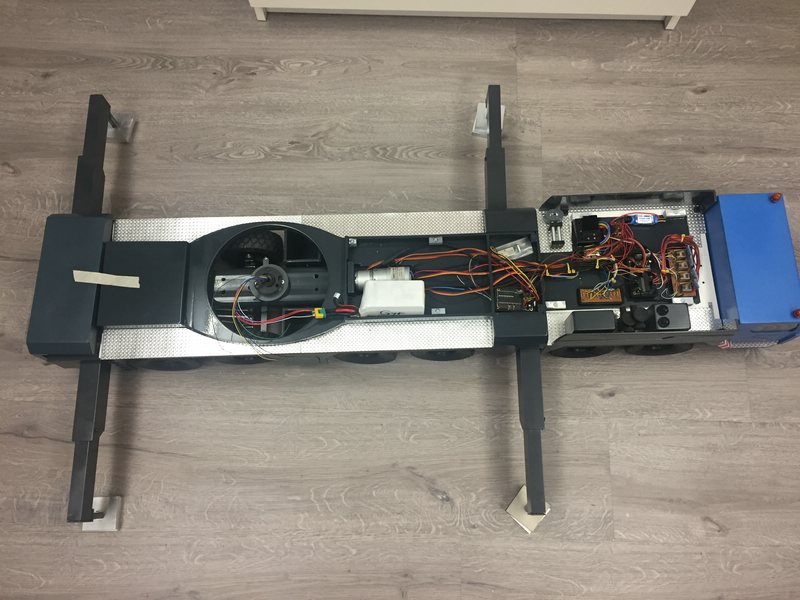
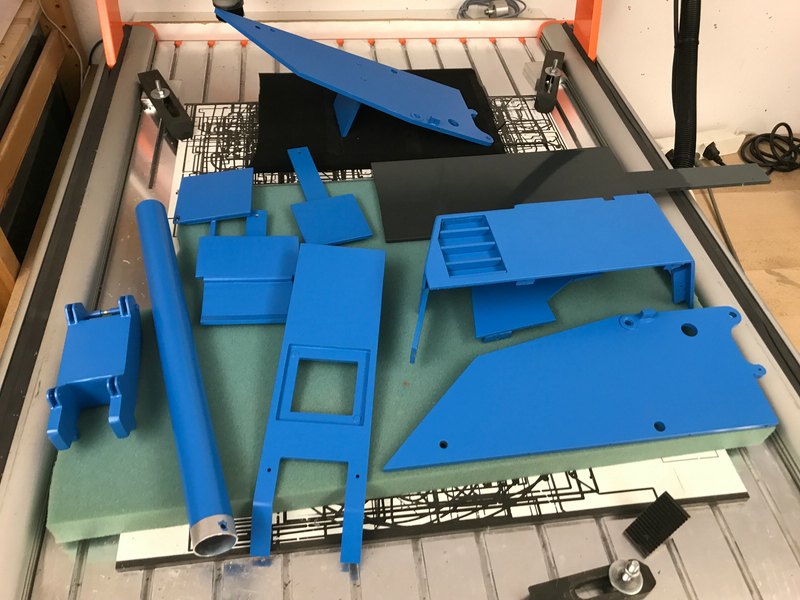
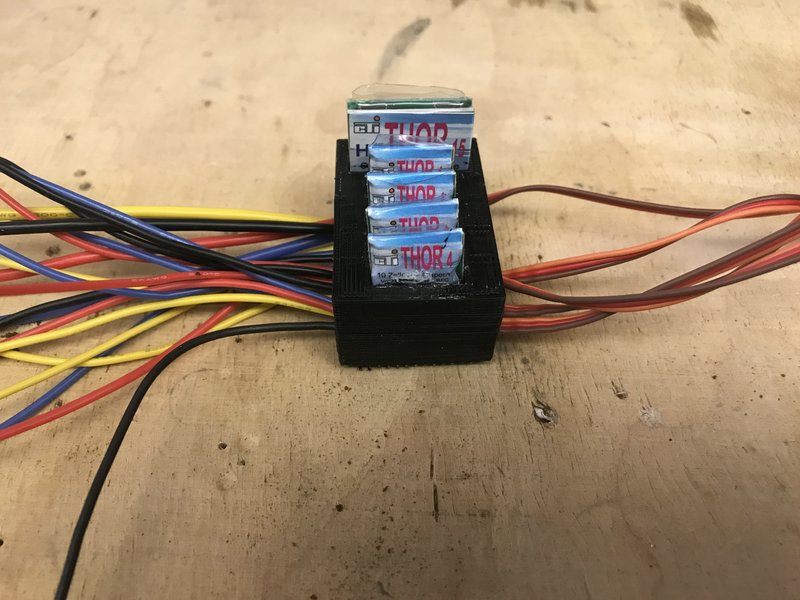
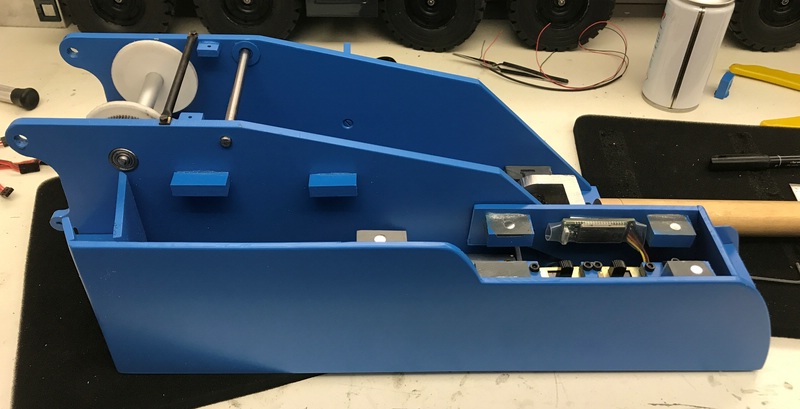
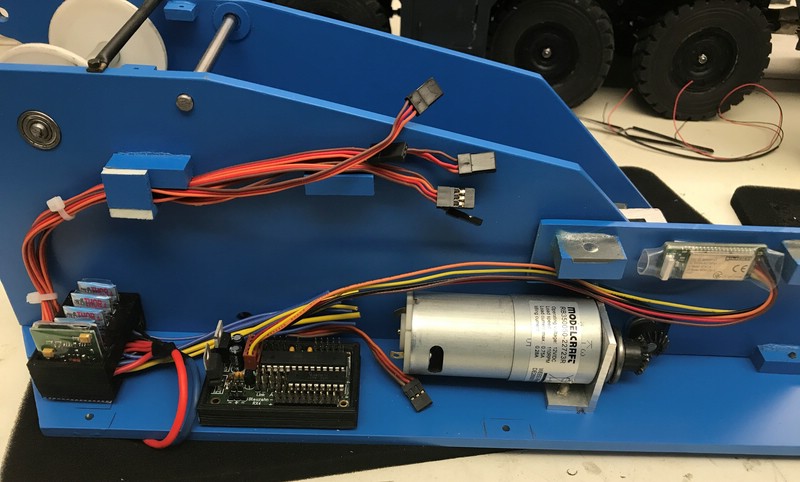
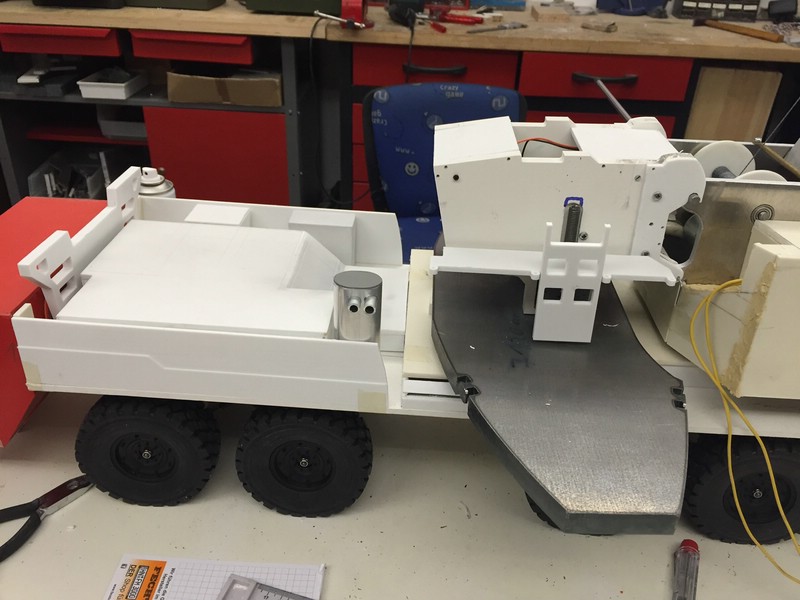
- Aufbauten hinter Kabine Unterwagen. Diese werden magnetisch befestigt und beherbergen dann die ganze Elektronik des Unterwagens.

Nächste Baustellen:
- Bau der kleinen Hakenflasche
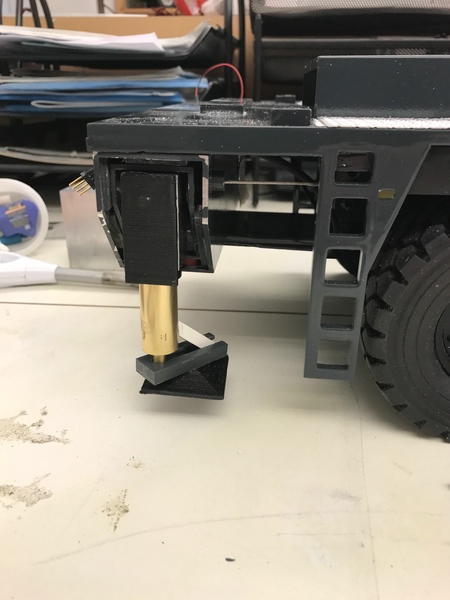
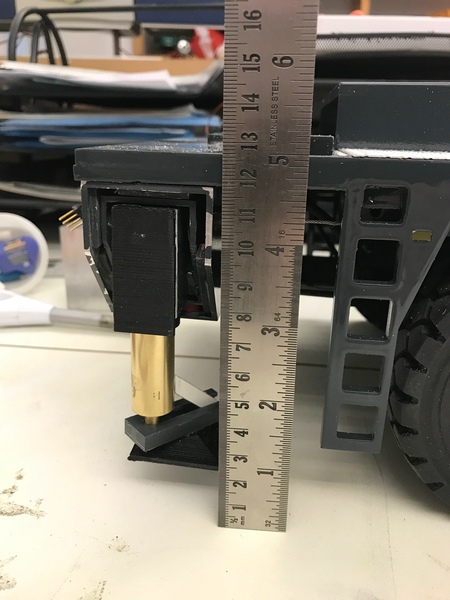
- Überarbeitung Stützen
Gruss Dani
Es ist wieder ein kleines Stück vorwärts gegangen. Die Schwerpunkte lagen bei folgenden Arbeiten:
- Oberwagen hinten kürzen (wegen etwa 5mm war ein Durchschwenken des Ballast nicht möglich)
- Lüftungsgitter hinten (wird magnetisch befestigt und dient als Einschubsöffnung für den Akku)
- Fertigstellen Rohbau Ballast (getestet mit 21Kg. Heben funktioniert einwandfrei)
- Aufbauten hinter Kabine Unterwagen. Diese werden magnetisch befestigt und beherbergen dann die ganze Elektronik des Unterwagens.
Nächste Baustellen:
- Bau der kleinen Hakenflasche
- Überarbeitung Stützen
Gruss Dani